Robotics Technology That Will Change the World!
About Me
Profile

Ph.D. Yoonseok Pyo / 表 允晳 / 표 윤석
Senior Research Engineer / Research And Development Department
ROBOTIS CO., LTD. (http://www.robotis.com)
I am a senior research engineer in ROBOTIS CO., LTD. and currently working on the service robot platform. I received Ph.D. degree and M.E. degree from the Graduate School of Information Science and Electrical Engineering, Kyushu University in 2016 and 2013. I was a research fellow of the Japan Society for the Promotion of Science (JSPS) from 2014 to 2016. I worked as a research fellow at Korea Institute of Science and Technology (KIST) from 2009 to 2010. I received B.E. degree from the Electronics & Information Engineering, Kwangwoon University, Korea, in 2009. My research interest is intelligent system and currently focusing on service robot platform based on the open source.
Books (10), Journals (7), International Conference (9), Domestic Conference (24) [Publications]
Curriculum Vitae - 2016.04 (PDF format)
Experience
2016-04 ~ PRESENT | Senior Research Engineer, ROBOTIS Co., Ltd.
2018-09 ~ 2019-12 | ROS 2 Technical Steering Committee (TSC)
2014-05 ~ 2016-03 | JSPS Research Fellow, Japan Society for the Promotion of Science
2011-05 ~ 2014-04 | Part Time, Dongbu Robot Co., Ltd.
2010-04 ~ 2011-09 | Visiting reporter, Monthly Robot
2009-05 ~ 2010-02 | Research Fellow, Korea Institute of Science and Technology (KIST)
2008-07 ~ 2008-08 | Intern, National Instruments Korea
2005-02 ~ 2005-08 | Intern, ROBOTIS Co., Ltd.
Education
2013-04 ~ 2016-03 | Ph.D., Graduate School of Information Science and Electrical Engineering, Kyushu University, Japan
2011-04 ~ 2013-03 | M.E., Graduate School of Information Science and Electrical Engineering, Kyushu University, Japan
2010-04 ~ 2011-03 | Research Student, Department of Advanced Information Technology, Kyushu University, Japan
2002-03 ~ 2009-02 | B.E., Electronics & Informaion Engineering, Kwangwoon University, Korea
Awards
2019-10 | Ministerial Citation, Ministry of Trade, Industry and Energy, Korea
2019-04 | The Japan Society of Mechanical Engineers (JSME), Education Award
2017-10 | Finalist of arm TechCon Innovation Award 2017
2017-06 | Finalist of Best Service Robotics Paper Award at ICRA 2017
2012-12 | Excellent Presentation Award of the SI2012, SI2012 Committee
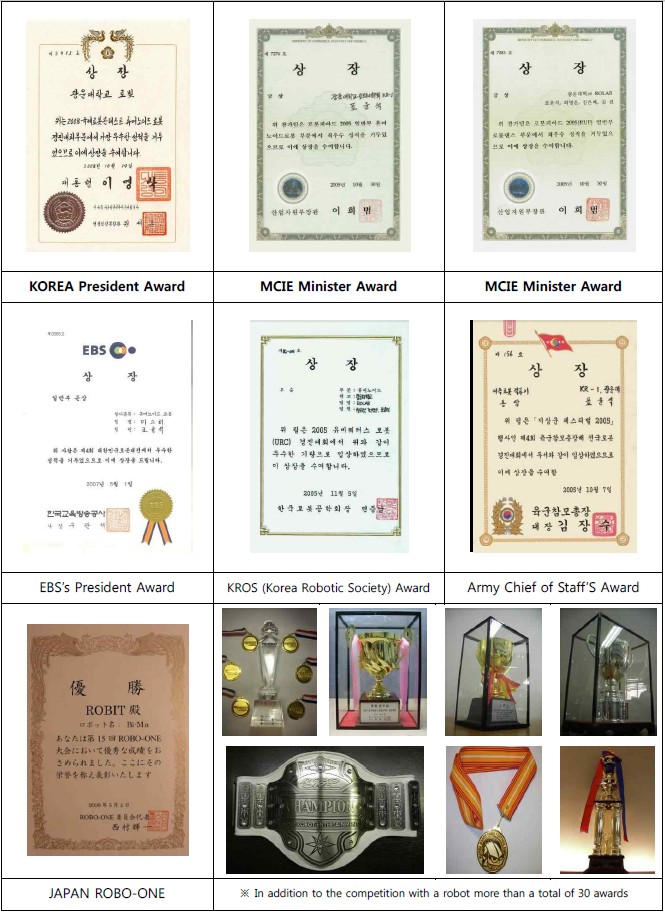
2009-12 | Best Poster Award, KIST Chief
2009-05 | Chairperson Award of Japan 15th ROBO-ONE, ROBO-ONE Committee
2008-10 | Korea President Award, International Robot Contest (IRC2008)
2005-11 | Korea Robotics Society Chief Award, Ubiquitous Robot Contest (URC2005)
2005-10 | MCIE Minister Award, Robot Universiade Festival (RUF2005)
2005-10 | MCIE Minister Award, ROBOTPIAD 2005
etc. Awards
Scholarship
2012-04 ~ 2014-03 | Rotary YONEYAMA Memorial Scholarship Foundation, Rotary YONEYAMA Memorial Scholarship Foundation
2007-03 ~ 2009-02 | Scholarships of robot, Full tuition, Kwangwoon University
Activities of Community
2013-03 ~ PRESENT | Open Robotics Community Alliance (http://www.oroca.org/), Manager of Community (2013.03 ~ PRESENT)
2006-11 ~ 2009-05 | Kwangwoon Robot Sport Game Team (ROBIT), Captain 2 years, Development of humanoid robot and take part in a robot competition
2002-03 ~ 2009-02 | Robot Laboratory (ROLAB), Captain 1 year, Robot Study Group activities
Research and Development
2018.10 ~ PRESENT (ROBOTIS)

Last-Mile Delivery Robot is a new project for food delivery service. Outdoor delivery demonstration using autonomous driving based robot platform in Magok Industrial Complex, Seoul, Koera. ROBOTIS provided robot delivery service to deliver food operators and residents within a radius of 1km radius of ROBOTIS Headquarters in Magok district to realize the technology that autonomous robots deliver food directly to customers at restaurants.
- News link
- Video link
2016.04 ~ 2019.12 (ROBOTIS)
TurtleBot3 is a new generation mobile robot that is modular, compact and customizable. Let’s explore ROS and create exciting applications for education, research and product development. The goal of TurtleBot3 is to drastically reduce the size and lower the price of the platform without sacrificing capability, functionality, and quality. Optional parts such as chassis, computers and sensors are available, and TurtleBot3 can be customized in various ways. TurtleBot3 is willing to be in the center of the maker movement by applying the latest technical advances of the SBC(Single Board Computer), the Depth sensor and 3D printing technology. TurtleBot3 is a collaboration project among Open Robotics, ROBOTIS, and more partners like Intel, Onshape, OROCA. The Open Robotics is in charge of software and community activities, while ROBOTIS is in charge of manufacturing and global distribution. We need more partners who can provide technology, educational service or distribution in each country.
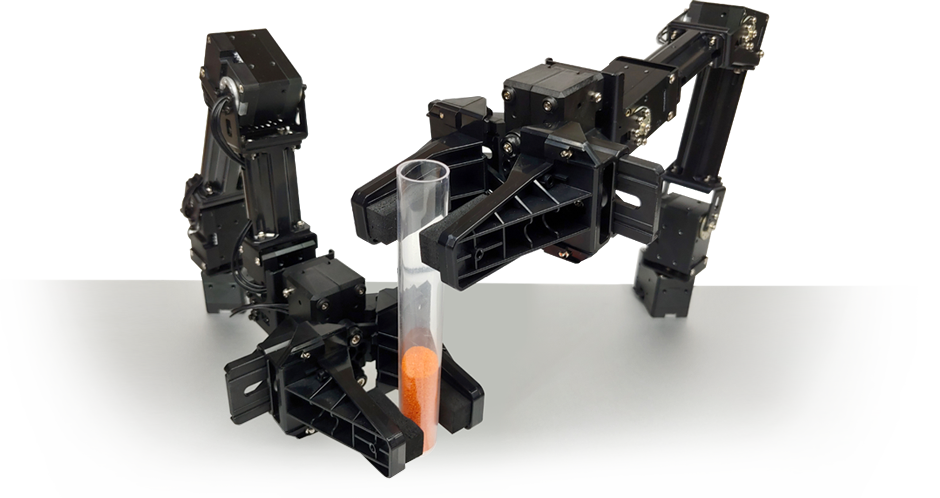
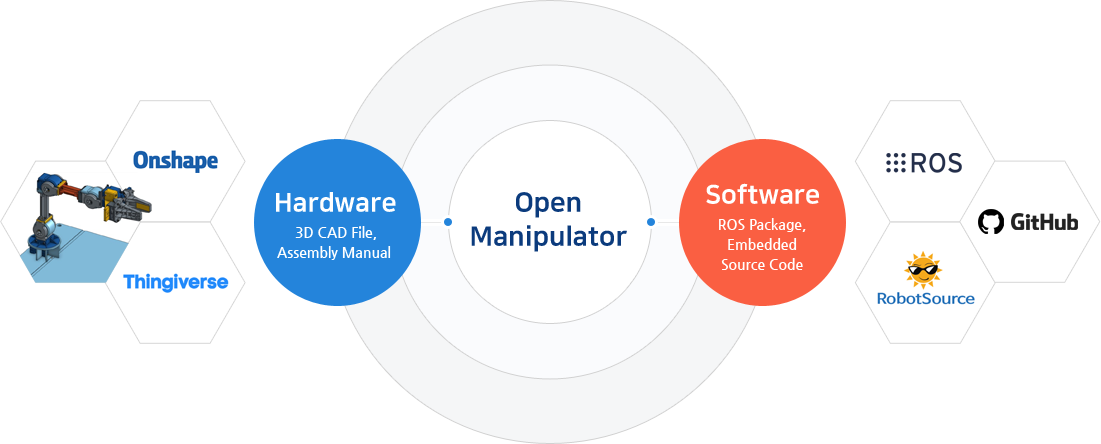
OpenManipulator-X is an open source software and open source hardware based manipulator developed by ROBOTIS. OpenManipulator supports the Dynamixel X series, and you can make robots by choosing the actuators of the specifications you require. Also, since it is composed of the basic frame and the 3D printed frame, it is possible to produce a new type of manipulator according to your environment or purpose. With these characteristics, we will provide manipulators with various shapes and functions such as SCARA, Planar, and Delta in addition to the four-joint manipulator. OpenManipulator supports ROS, OpenCR, Arduino IDE and Processing.
Project Manager
- TurtleBot
- OpenManipulator-X
- OpenCR
- Dynamixel SDK
- Dynamixel Workbench
- ROBOTIS OpenSource Projects
2013.04~2016.03 (Ph.D.)
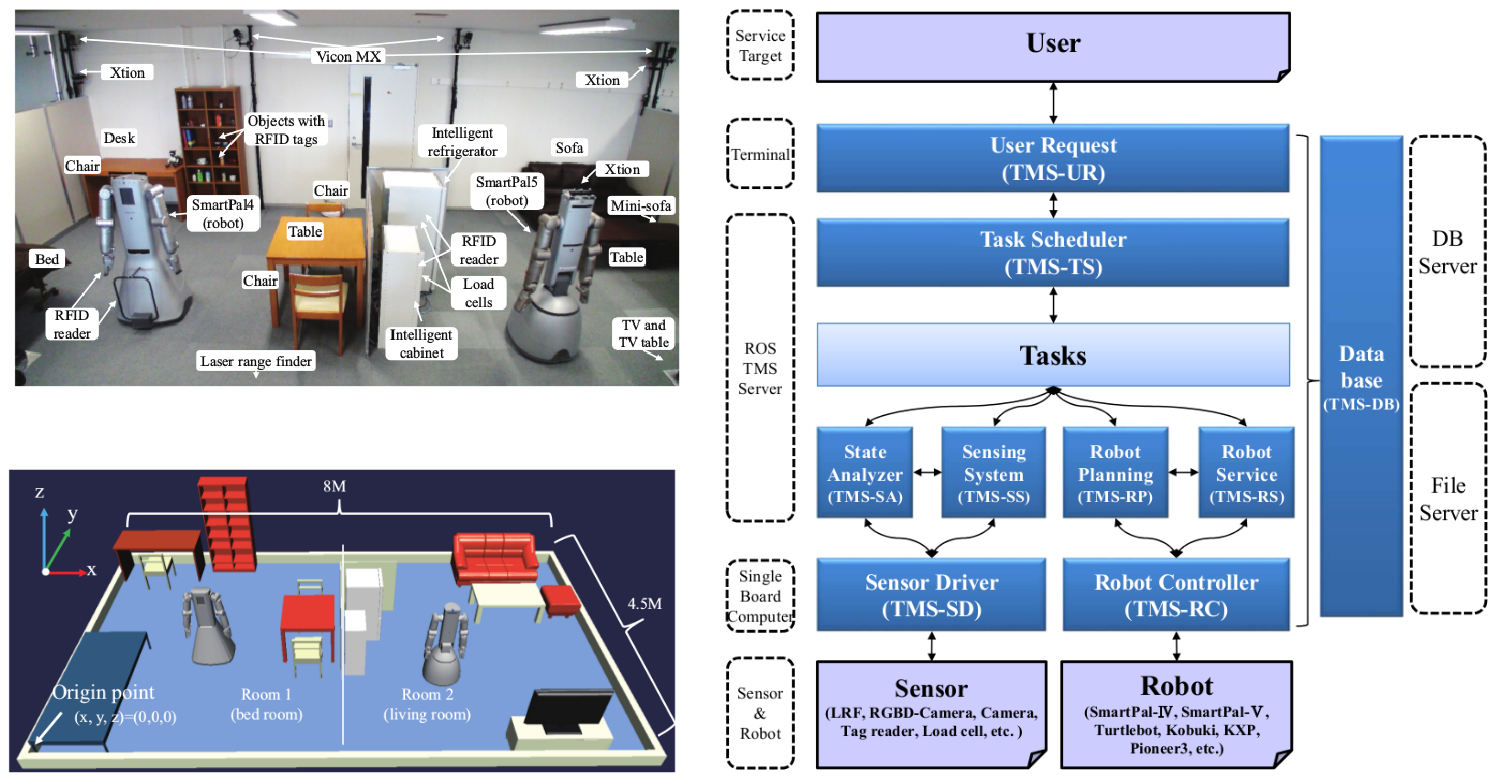
Daily life assistance is one of the most important applications for service robots. For comfortable assistance, service robots must recognize the surrounding conditions correctly, including human motion, the position of objects, and obstacles. However, since the everyday environment is complex and unpredictable, it is almost impossible to sense all of the necessary information using only a robot and sensors attached to it. In order to realize a service robot for daily life assistance, we have been developing an informationally structured environment using distributed sensors embedded in the environment. It is a service robot system with an informationally structured environment referred to the ROS-TMS. This system enables the integration of various data from distributed sensors, as well as storage of these data in an on-line database and the planning of the service motion of a robot using real-time information about the surroundings.
Please see this webpage, If you want to know more information (http://irvs.github.io/ros_tms/)
Also, it is now available for download from Github(https://github.com/irvs/ros_tms)
2011.04~2013.03 (M.E.)
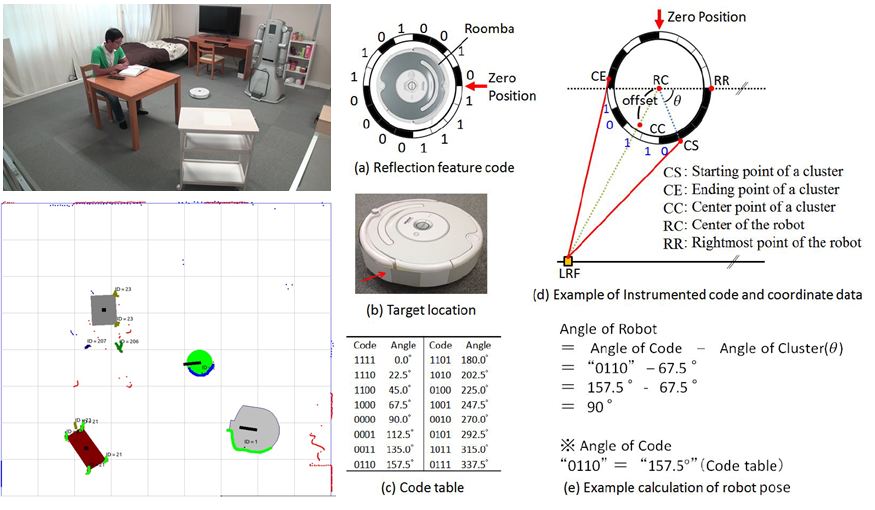
We propose a method for classification of objects on the floor using distance and reflectance acquired by the laser range finder (LRF) installed in the room and a strip of mirror attached to a side wall close to a floor. In addition, we propose a method for measurement of robot pose using the tag encodes reflection characteristics.
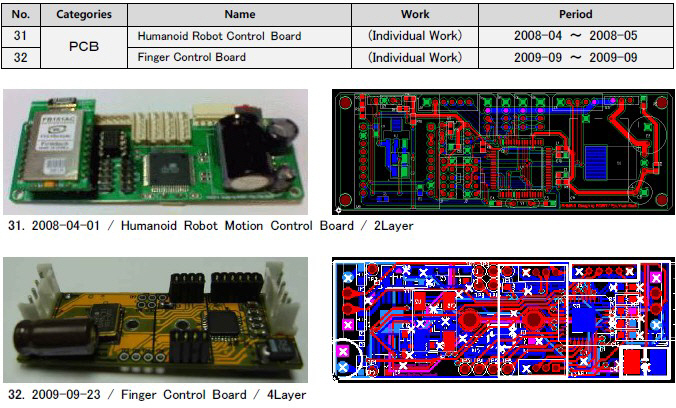
2002.03~2009.02 (B.E.)
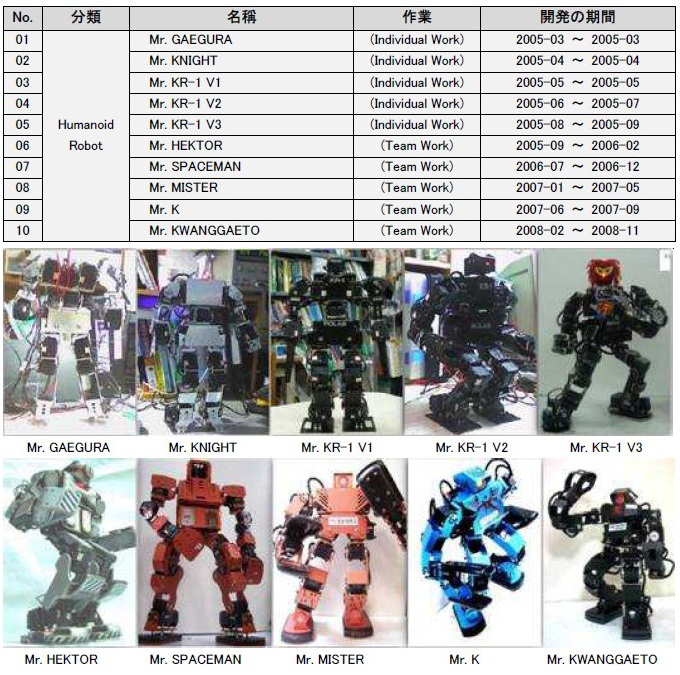
Development of small humanoid robots began in 2005. It was all of my college life. It was one of my dreams. Initially, my humanoid robot is very low level but, in Unit 1 to Unit 10, while production techniques and more general development process of the robot was able to learn. In addition, a variety of development was an opportunity to learn skills.
Part of development
- Machine Design: 2D with 3D design using CAD-Tool (Inventor) and CNC machining equipment
- Circuit Design: PCB
- Tool (PADS) using PCB design
- Firmware: ATmega128 MCU firmware, motor control, multiple communication, dynamic walking algorithm and acceleration / deceleration
- Software: LabVIEW program developed using the sensor measurements
- Sensors: accelerometers and angular rate sensors, automatic defense system development
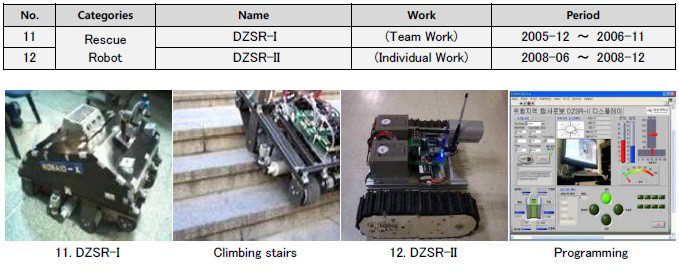
"DZSR - I" and "DZSR - II" is "Dangerous Zone Searching Robot". The wheel consists of Caterpillar. Robots on the road, off-road, ramp, stairs, etc., designed to be driven smoothly. In addition, cameras, location sensors, environmental sensors and remote information is available in the job. And the robot to these activities, designed to identify dangerous situations. And then I developed "DZSR - II" of the old heavy and bulky to address the shortcomings were smaller (65Kg → 11Kg).
Part of development
- Circuit design: making motor drive circuit and multilateral communication, wireless communication circuits
- Firmware: ATmega128 MCU and DSP2406 MCU firmware, motor control, multi-communication
- Software: the location (distance, slope), and environmental information(temperature, humidity, illumination, gas) development of monitoring program
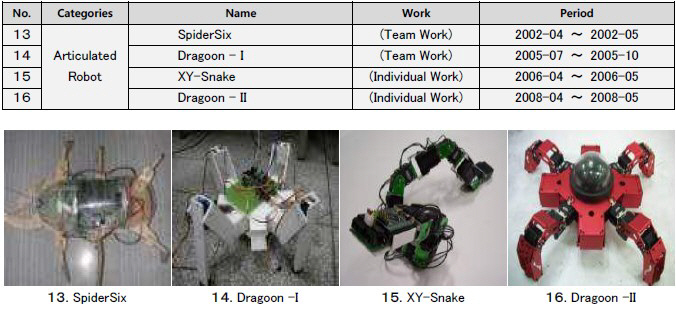
Part of development
- Articulated motor control, various articulated mechanical design
- 4-foot, 6-foot, 10 pedestrians and driving joint development of algorithms
- 8051, ATmega8535, ATmega128, ARM7TDMI controller and several
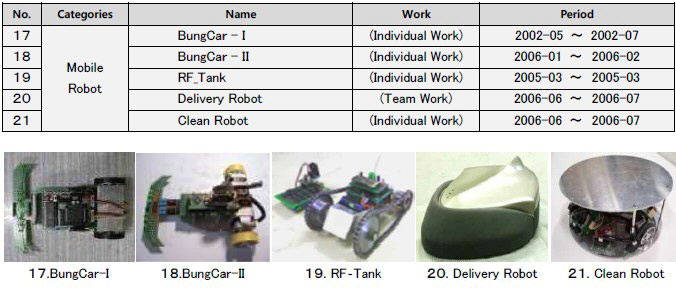
Part of development
- Step, DC motor control, autonomous action RF transceiver and a bluetooth communications transmission equipment, line tracking, remote control, movie props for the delivery robot, cleaning robot developed
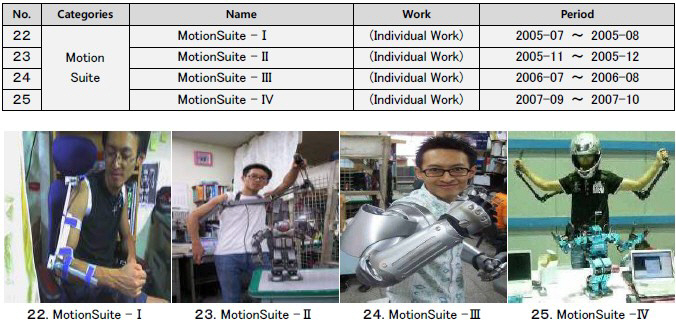
"MotionSuite I ~ IV"’s the purpose of the project is the effectiveness of the humanoid motion system. This works as an input to accept a person's actions that this robot is a real-time input receiving equipment. This was to increase the effectiveness of the humanoid robot. "MotionSuite - I" 8 bit positions of the five joints were able to transmit information over the wire. However, "MotionSuite - IV" the 10 joints of 10-bit position and orientation information from one robot to the real-time wireless transmission was possible.
Part of development
- gathering information, the wireless package, introduction of calibration technique, using a geomagnetic direction sensor information delivery.
- robot motion controller using motion capture device
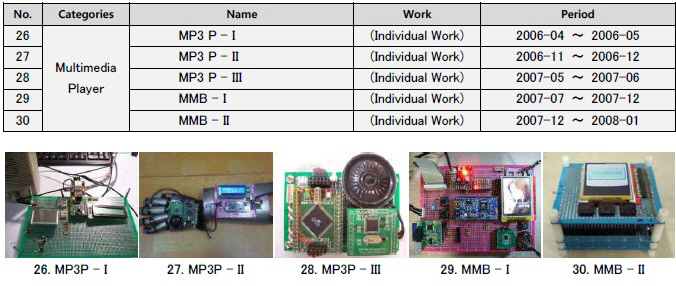
Part of development
- Resistance by using only a voice output device to start up an MP3 player with MP3 decoder chip development.
- ARM7TDMI and the MP3 decoder, TFTLCD, multimedia equipment development using the touch panel.
- Using the robotic equipment used in audio systems
Part of development
- Circuit design using PADS and OrCAD
Publications
Books (10)
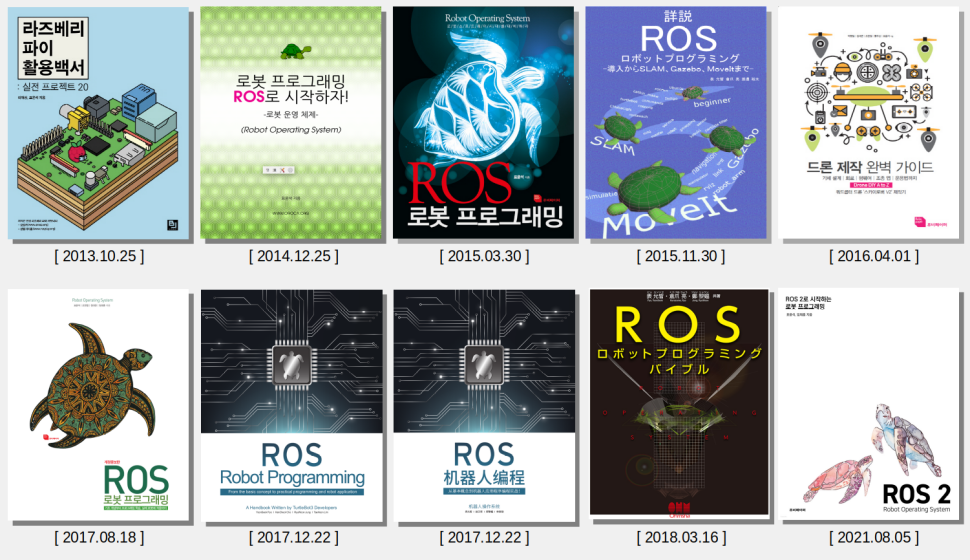
Robot Programming with ROS 2 (in Korean)
ROS 2로 시작하는 로봇 프로그래밍
Yoonseok Pyo, Taehun Lim
Rubypaper, ISBN: 9791186710722, Online Bookstore, pp. 1-636, 2021.08.05
ROS Robot Programming (in Japanese)
ROSロボットプログラミングバイブル
Yoonseok Pyo, Ryo Kurazume, Leon Ryuwoon Jung
オーム社, ISBN: 9784274221965, Amazon Bookstore, pp. 1-437, 2018.03.16
ROS Robot Programming (in English)
Yoonseok Pyo, HanCheol Cho, Leon Ryuwoon Jung, Taehun Lim
ROBOTIS Co.,Ltd., ISBN: 9791196230715, E-Book, pp. 1-487, 2017.12.22
ROS Robot Programming (in Chinese)
ROS 机器人编程
Yoonseok Pyo, HanCheol Cho, Leon Ryuwoon Jung, Taehun Lim
ROBOTIS Co.,Ltd., ISBN: 9791196230722, E-Book, pp. 1-496, 2017.12.22
ROS Robot Programming (in Korean, Second Edition)
ROS 로봇 프로그래밍 (개정증보판)
Yoonseok Pyo, HanCheol Cho, Leon Ryuwoon Jung, Taehun Lim
Rubypaper, ISBN: 9791186710180, Online Bookstore, pp. 1-482, 2017.08.18
Drone DIY A to Z (in Korean)
드론 제작 완벽 가이드
H.I. Park, D.G. Kim, H.C. Jo, U.S. Hwang, Y.S. Pyo
Rubypaper, ISBN: 9791186710036, Online Bookstore, pp. 1-492, 2016.04.01
ROS Robot Programming (in Japanese)
詳説 ROSロボットプログラミング
Yoonseok Pyo, Ryo Kurazume, Yuuta Watanabe
Kurazume Laboratory, ISBN: 9784990873608, E-Book, pp. 1-342, 2015.11.30
ROS Robot Programming (in Korean)
ROS 로봇 프로그래밍
Yoonseok Pyo
Rubypaper, ISBN: 9791195149278, Online Bookstore, pp. 1-392, 2015.03.30
Let's start the robot programming using ROS. (in Korean)
로봇 프로그래밍 ROS로 시작하자!
Yoonseok Pyo
Free E-Book, It is now available for download from Github(https://github.com/robotpilot/rosbook_kr), pp. 1-261, 2014.12.25
Application White Paper of Raspberry Pi (in Korean)
라즈베리 파이 활용백서 | 실전 프로젝트 20
Yoonseok Pyo, Jaesang Lee
BJ Public, ISBN: 9788994774497, Online Bookstore, pp. 1-332, 2013.10.25
Journals (7)
Development of ROS-TMS 5.0 for informationally structured environment
Junya Sakamoto, Kouhei Kiyoyama, Kohei Matsumoto, Yoonseok Pyo, Akihiro Kawamura, Ryo Kurazume
ROBOMECH Journal, Vol.5, No.1, pp. 24, 2018
https://doi.org/10.1186/s40648-018-0123-9
PDF
ROS-TMS and Big Sensor Box: Platforms for Informationally Structured Environment
Ryo Kurazume, Yoonseok Pyo, Tokuo Tsuji, Akihiro Kawamura
Journal of the Robotics Society of Japan, Vol.35, No.4, pp. 346-357, 2017
https://doi.org/10.7210/jrsj.35.346
PDF (in Japanese)
Service Robot System with an Informationally Structured Environment
Yoonseok Pyo, Kouhei Nakashima, Shunya Kuwahata, Ryo Kurazume, Tokuo Tsuji, Ken'ichi Morooka, Tsutomu Hasegawa
Robotics and Autonomous Systems, Vol. 74, Part A, pp. 148-165, December 2015
http://dx.doi.org/10.1016/j.robot.2015.07.010
Immersive VR Interface for Informationally Structured Environment
Yoonseok Pyo, Tokuo Tsuji, Yuuka Hashiguchi and Ryo Kurazume
Journal of the Robotics Society of Japan, Vol.33, No.8, pp. 651-654, 2015, PDF (in Japanese)
An Informationally Structured Room for Robotic Assistance
Tokuo Tsuji, Oscar Martinez Mozos, Hyunuk Chae, Yoonseok Pyo, Kazuya Kusaka, Tsutomu Hasegawa, Ken’ichi Morooka and Ryo Kurazume
Sensors 2015, Vol.15, No.4, pp. 9438-9465, 2015
http://www.mdpi.com/1424-8220/15/4/9438
Floor Sensing System Using Laser Reflectivity for Localizing Everyday Objects and Robot
Yoonseok Pyo, Tsutomu Hasegawa, Tokuo Tsuji, Ryo Kurazume and Ken'ichi Morooka
Sensors 2014, Vol.14, No.4, pp. 7524-7540, 2014
http://www.mdpi.com/1424-8220/14/4/7524
Measurement of Moving Objects and Estimation of Human Behavior Using Floor Sensing System in Daily Life Environment
Tsutomu Hasegawa, Yoonseok Pyo, Masahide Tanaka, Tokuo Tsuji, Ken’ichi Morooka and Ryo Kurazume
Journal of the Robotics Society of Japan, Vol.31, No.8, pp. 769-779, 2013, PDF (in Japanese)
International Conference (9)
Feasibility study of IoRT platform "Big Sensor Box"
Ryo Kurazume, Yoonseok Pyo, Kazuto Nakashima, Tokuo Tsuji, Akihiro Kawamura
Proc. IEEE International Conference on Robotics and Automation (ICRA2017), Singapore, 5.29-6.3, 2017, PDF
Control Architecture for Service Drone in Informationally Structured Environment
Ghallabi Farouk, Akihiro Kawamura, Yoonseok Pyo, Tokuo Tsuji, Ryo Kurazume
2015 IEEE/SICE International Symposium on System Integration (SII 2015), Nagoya, Dec. 11-13, 2015, PDF
Fourth-Person Sensing for a Service Robot
Kazuto Nakashima, Yumi Iwashita, Yoonseok Pyo, Asamichi Takamine, Ryo Kurazume
Proc. of IEEE International Conference on Sensors 2015, pp.1110-1113, Nov. 1-4, 2015, PDF
Immersive VR Interface for Informationally Structured Environment
Yoonseok Pyo, Tokuo Tsuji, Yuuka Hashiguchi, Ryo Kurazume
IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM2015), pp.1766-1771, July 7-11, 2015, PDF
Motion Planing for Fetch-and-Give Task using Wagon and Service Robot
Yoonseok Pyo, Kouhei Nakashima, Tokuo Tsuji, Ryo Kurazume, Ken'ichi Morooka
IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM2015), pp.925-932, July 7-11, 2015, PDF
Fourth-Person Sensing for Pro-active Services
Yumi Iwashita, Kazuto Nakashima, Yoonseok Pyo, Ryo Kurazume
Fifth International Conference on Emerging Security Technologies (EST-2014), pp.113-117, 2014.09, PDF
Measurement and Estimation of Indoor Human Behavior of Everyday Life Based on Floor Sensing with Minimal Invasion of Privacy
Yoonseok Pyo, Tsutomu Hasegawa, Masahide Tanaka, Tokuo Tsuji, Ken’ichi Morooka and Ryo Kurazume
Proceeding of the IEEE International Conference on Robotics and Biomimetics (ROBIO), pp. 2170-2176, 2013.12, PDF
The Intelligent Room for Elderly Care
Oscar Martinez Mozos, Tokuo Tsuji, Hyunuk Chae, Shunya Kuwahata, Yoonseok Pyo, Tsutomu Hasegawa Ken'ichi Morooka, and Ryo Kurazume
5th International Work-conference on the Interplay between Natural and Artificial Computation, pp. 103-112, 2013.06, PDF
High-precision three-dimensional laser measurement system by cooperative multiple mobile robots
Yongjin Jeong, Yoonseok Pyo, Yumi Iwashita, Tsutomu Hasegawa and Ryo Kurazume
2012 IEEE/SICE International Symposium on System Integration (SII2012), pp. 198-205, 2012.12, PDF
Domestic Conference (24)
ROS-TMS ver.4.0 -情報構造化環境のためのオペレーティングシステム-
ピョ ユンソク, 渡邊 裕太, 重兼 聡夫, 稲田 大亮, 辻 徳生, 河村 晃宏, 倉爪 亮
第21回ロボティクスシンポジア, pp.242-249, 2016.3.18
ROS-TMS と環境情報構造化空間 Big Sensor Box の開発
倉爪 亮, ピョ ユンソク, 辻 徳生, 河村 晃宏
第16回計測自動制御学会システムインテグレーション部門講演会 SI2015, pp.2M1-4, 2015.12.15
複数台のKinectを用いた情報構造化空間における人間動作の収集
大西 正倫, ピョ ユンソク, 辻 徳生, 河村 晃弘, 倉爪 亮
第34回SICE九州支部学術講演会, pp.103B2, 2015.11.28-29
屋内空間CPSプラットフォームBig Sensor Boxの開発と車いす型見守りロボットによる搬送実験
重兼 聡夫, 渡邊 裕太, 稲田 大亮, ピョ ユンソク, 辻 徳生, 河村 晃宏, 倉爪 亮
第33回日本ロボット学会学術講演会, 3H1-02, 2015.09
サービスロボットのための第4人称センシングの提案
中嶋 一斗, 岩下 友美, ピョ ユンソク, 高嶺 朝理, 倉爪 亮
The 18th Meeting on Image Recognition and Understanding (MIRU2015), SS4-11, 2015.07
多様なセンサを搭載した小型複合センサ端末の開発と人物追跡のための最適配置計画
渡邊裕太、倉爪亮、ピョ ユンソク、辻徳生、諸岡健一
日本機械学会ロボティクスメカトロニクス講演会2015, 1A1-H05, 2015.05
環境情報構造化プラットフォームROS-TMSにおけるタスク管理機構
:第2報異種ロボットによる作業情報構造化実験
橋口優香、ピョ ユンソク、辻徳生、諸岡健一、倉爪亮
日本機械学会ロボティクスメカトロニクス講演会2015, 1A1-N01, 2015.05
没入感インターフェースOculus Rift を用いたROS-TMS ビューアの開発
ピョ ユンソク、辻徳生、橋口優香、倉爪亮
日本機械学会ロボティクスメカトロニクス講演会2015, 1A1-N07, 2015.05
サービスロボットのための第4人称センシングの提案
中嶋一斗、岩下友美、ピョ ユンソク、高嶺朝理、倉爪亮
日本機械学会ロボティクスメカトロニクス講演会2015, 1A1-O03, 2015.05
携帯端末とARマーカを用いたROS-TMSユーザインタフェースの開発
大石哲朗, 表允晳, 辻徳生, 諸岡健一, 倉爪亮
第15回計測自動制御学会システムインテグレーション部門講演会, 1G3-7, 2014.12
環境情報構造化プラットフォームROS-TMSにおけるタスク管理機構
橋口優香, 表允晳, 辻徳生, 諸岡健一, 倉爪亮
第32回日本ロボット学会学術講演会, 3C2-03, 2014.09
分散センサを用いた室内状況推定に基づくサービス自動実行アーキテクチャ
ピョユンソク, 永田晃洋, 中島洸平, 桑畑舜也, 辻徳生, 諸岡健一, 倉爪亮, 長谷川勉
日本機械学会ロボティクスメカトロニクス講演会2014, 1P2-H02, 2014.05
爪を有する多指ハンドの把持計画
馬場恒星, 辻徳生, 表允晳, 倉爪亮, 諸岡健一, 長谷川勉, 原田研介
日本機械学会ロボティクスメカトロニクス講演会2014, 3P2-R01, 2014.05
情報構造化アーキテクチャの提案とサービスロボットのオンライン動作計画の実現
表允晳, 辻徳生, 橋口優香, 永田晃洋, 中島洸平, 倉爪亮, 長谷川勉, 諸岡健一
第19回ロボティクスシンポジア講演予稿集, 6D2, pp.624-630, 2014.03
アクティブRFIDタグと床上レーザレンジファインダを用いた複数人物の追跡
日下和也, 表允晳, 長谷川勉, 辻徳生, 倉爪亮, 諸岡健一
第14回計測自動制御学会 システムインテグレーション部門講演会, 2013.12
生活支援のための環境分散センサ情報統合アーキテクチャ
永田晃洋, 長谷川勉, 表允晳, 辻徳生, 諸岡健一, 倉爪亮
第31回日本ロボット学会学術講演会, 2013.09
パーソナル清掃ロボットによる室内落下日用品の収集
橋口優香, 長谷川勉, 表允晳, 辻徳生, 諸岡健一, 倉爪 亮
日本機械学会ロボティクスメカトロニクス講演会2013, 2013.05
多指ハンドを用いた関節角の位置制御に基づく誤差に頑健な物体把持
馬場恒星, 辻徳生, 河村晃宏, 表允晳, 田原健二, 原田研介, 長谷川勉, 倉爪亮
日本機械学会ロボティクスメカトロニクス講演会2013, 2013.05
床上センシングシステムと室内生活行動モデルにもとづく居住者の行動推定
長谷川勉, 田中真英, 表允晳, 辻徳生, 諸岡健一, 倉爪亮
第18回ロボティクスシンポジア, 3D2, pp. 330-336, 2013.03
レーザレンジファインダの反射強度を利用した物体及びロボットの位置計測
表允晳, 田中真英, 長谷川勉, 辻徳生, 諸岡健一, 倉爪亮
第13回計測自動制御学会システムインテグレーション部門講演会, 1H3-1, pp. 587-591, 2012.12
レーザレンジファインダを用いた床上センシングによる室内生活行動の計測
田中真英, 表允晳, 辻徳生, 長谷川勉, 諸岡健一, 倉爪亮
第13回計測自動制御学会システムインテグレーション部門講演会, 1H3-2, pp. 592-595, 2012.12
クラウドTMS: ロボットタウンマネジメントのためのスケーラブルな分散処理システム
辻徳生, 表允晳, 曾昀, 永田晃洋, 長谷川勉, 倉爪亮, 諸岡健一, 村上剛司
第13回計測自動制御学会システムインテグレーション部門講演会, 1H4-7, pp. 633-636, 2012.12
レーザレンジファインダによる反射強度と位置計測を用いた床上センシングシステム
表允皙, 長谷川勉, 曾昀, 辻徳生, 諸岡健一, 倉爪亮
第30回日本ロボット学会学術講演会, 2H2-2, 2012.09
ジェスチャによる移動ロボットへの動作目標指示と誤差修正
表允皙, 長谷川勉, 辻徳生, 諸岡健一, 倉爪亮
第29回日本ロボット学会学術講演会, 3O1-7, 2011.09
Workshops (2)
Informationally Structured Environment for Elderly Care House
Yoonseok Pyo, Tokuo Tsuji, Shunya Kuwahata, Akihiro Nagata, Tsutomu Hasegawa, Ken’ichi Morooka, and Ryo Kurazume
Proc. The 9th Joint Workshop on Machine Perception and Robotics(MPR2013), K-O-02, 2013.10
Open-source Platform for Humanoid
Yoonseok Pyo, 제11회 한국로봇종합학술대회(KRoC2016), 인간과 더 가까워진 휴머노이드 로봇, 2016.1.27
Awards
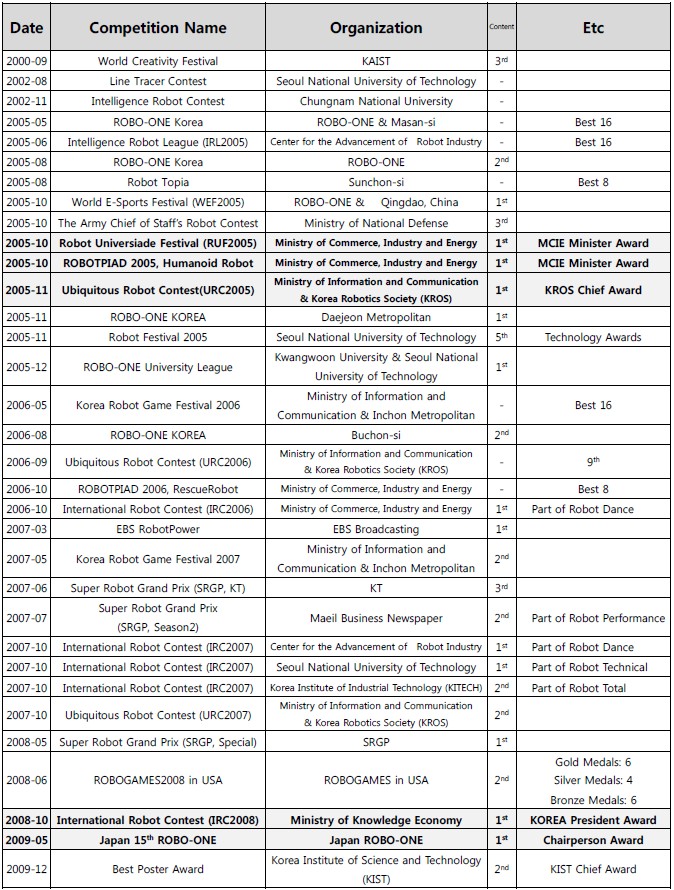
2019-10 | Ministerial Citation, Ministry of Trade, Industry and Energy, Korea
2019-04 | The Japan Society of Mechanical Engineers (JSME), Education Award
2017-10 | Finalist of arm TechCon Innovation Award 2017
2017-06 | Finalist of Best Service Robotics Paper Award at ICRA 2017
2012-12 | Excellent Presentation Award of the SI2012, SI2012 Committee
2009-12 | Best Poster Award, KIST Chief
2009-05 | Chairperson Award of Japan 15th ROBO-ONE, ROBO-ONE Committee
2008-10 | Korea President Award, International Robot Contest (IRC2008)
2005-11 | Korea Robotics Society Chief Award, Ubiquitous Robot Contest (URC2005)
2005-10 | MCIE Minister Award, Robot Universiade Festival (RUF2005)
2005-10 | MCIE Minister Award, ROBOTPIAD 2005
Media Activity






Contact
Research And Development Department
ROBOTIS CO., LTD. (http://www.robotis.com)
ROBOTIS Campus, 37, Magokjungang 5-ro 1-gil,Gangseo-gu, Seoul, 07594, Republic of Korea
Follow ROBOTIS on Facebook, Twitter, Linkedin, Youtube #1, Youtube #2
Tel: +82-70-8671-2678
Fax: +82-70-8230-1336
E-Mail: pyo (at) robotis.com
LInk: robotpilot.net | oroca.org | blog | ResearchGate | ROBOTIS CO., LTD.